Sensor
Sensor is used to set up parameters of the photosensitive elements.
For example:
import sensor# import the module of photosensitive element
# set the camera
sensor.reset()# reset the photosensitive elements
sensor.set_pixformat(sensor.RGB565)# set it as chromatic
sensor.set_framesize(sensor.QVGA)# set the framesize of the picture 设
sensor.skip_frames()# skip n pictures and wait before the photosensitive elements become stable after changing settings and skipping several frames
# take photos all the time
while(True):
img = sensor.snapshot()# take a photo; img is the object of an image
Reset
- sensor.reset()
reset the sensor
Set colors/black-and-white
- sensor.set_pixformat()
- sensor.GRAYSCALE: set grayscale with each pixel 8bit
- sensor.RGB565: color with each pixel 16bit
Set the framesize of the picture
- sensor.set_framesize()
- sensor.QQVGA: 160x120
- sensor.QQVGA2: 128x160 (on LCD shield)
- sensor.HQVGA: 240x160
- sensor.QVGA: 320x240
- sensor.VGA: 640x480 (only when OpenMV Cam M7 processes pictures in grayscale pattern or collect images in colors)
- sensor.QQCIF: 88x72
- sensor.QCIF: 176x144
- sensor.CIF: 352x288
Skip several frames
- sensor.skip_frames(n=10)
skip n pictures and wait before the photosensitive elements become stable after changing settings and skipping several frames
Take a picture
- sensor.snapshot()
take a picture, then return an Image object.
Auto gain/White balance
- sensor.set_auto_gain()
Set auto gain true or false. You need to set auto gain false when you use color tracking.
- sensor.set_auto_whitebal()
Set white balance true or false. You need to set white balance false when you use color tracking.
Set window ROI
sensor.set_windowing(roi)
ROI: The term ROI, region of interest, means extracting the subimage which you are to process from the whole image.
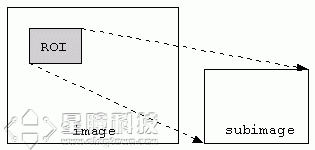
sensor.set_framesize(sensor.VGA) # high resolution
sensor.set_windowing((640, 80)) # extract the center area with 640*80
The form of ROI is(x, y, w, h). SeeUsage of statistics
Set the flip
- sensor.set_hmirror(True)
flip on horizontal direction
- sensor.set_vflip(True)
flip on vertical direction