max_blocks = 1000
max_blocks_per_id = 1000
s0_lower_limit = 1000
s0_upper_limit = 2000
s1_lower_limit = 1000
s1_upper_limit = 2000
analog_out_enable = False
analog_out_mode = 0
import image, math, pyb, sensor, struct, time
sensor.reset()
sensor.set_pixformat(sensor.GRAYSCALE)
sensor.set_framesize(sensor.QQVGA)
sensor.skip_frames(time = 2000)
red_led = pyb.LED(1)
green_led = pyb.LED(2)
blue_led = pyb.LED(3)
red_led.off()
green_led.off()
blue_led.off()
dac = pyb.DAC("P6") if analog_out_enable else None
if dac:
dac.write(0)
min_s0_limit = min(s0_lower_limit, s0_upper_limit)
max_s0_limit = max(s0_lower_limit, s0_upper_limit)
min_s1_limit = min(s1_lower_limit, s1_upper_limit)
max_s1_limit = max(s1_lower_limit, s1_upper_limit)
s0_pan = pyb.Servo(1)
s1_tilt = pyb.Servo(2)
s0_pan.pulse_width(int((max_s0_limit - min_s0_limit) // 2))
s1_tilt.pulse_width(int((max_s1_limit - min_s1_limit) // 2))
s0_pan_conversion_factor = (max_s0_limit - min_s0_limit) / 1000
s1_tilt_conversion_factor = (max_s1_limit - min_s1_limit) / 1000
def s0_pan_position(value):
s0_pan.pulse_width(round(s0_lower_limit + (max(min(value, 1000), 0) * s0_pan_conversion_factor)))
def s1_tilt_position(value):
s1_tilt.pulse_width(round(s1_lower_limit + (max(min(value, 1000), 0) * s1_tilt_conversion_factor)))
bus = pyb.SPI(2, pyb.SPI.SLAVE, polarity = 0, phase = 0, bits = 16)
while(True):
try:
sync_bytes = bus.recv(2, timeout = 10)
if((sync_bytes[0] == 0x00) and (sync_bytes[1] == 0x5A)):
break
except OSError as error:
pass
bus.deinit()
bus.init(pyb.SPI.SLAVE, polarity = 0, phase = 0, bits = 16)
def write(data):
max_exceptions = 10
loop = True
while(loop):
try:
bus.send(data, timeout = 10)
loop = False
except OSError as error:
if(max_exceptions <= 0):
return
max_exceptions -= 1
def available():
return 0
def read_byte():
return 0
def checksum(data):
checksum = 0
for i in range(0, len(data), 2):
checksum += ((data[i+1] & 0xFF) << 8) | ((data[i+0] & 0xFF) << 0)
return checksum & 0xFFFF
def to_object_block_format(tag):
angle = int((tag.rotation() * 180) // math.pi)
temp = struct.pack("<hhhhhh", tag.id() + 8, tag.cx(), tag.cy(), tag.w(), tag.h(), angle)
return struct.pack("<hh12s", 0xAA56, checksum(temp), temp)
fsm_state = 0
last_byte = 0
FSM_STATE_NONE = 0
FSM_STATE_ZERO = 1
FSM_STATE_SERVO_CONTROL_0 = 2
FSM_STATE_SERVO_CONTROL_1 = 3
FSM_STATE_SERVO_CONTROL_2 = 4
FSM_STATE_SERVO_CONTROL_3 = 5
FSM_STATE_CAMERA_CONTROL = 6
FSM_STATE_LED_CONTROL_0 = 7
FSM_STATE_LED_CONTROL_1 = 8
FSM_STATE_LED_CONTROL_2 = 9
def parse_byte(byte):
global fsm_state
global last_byte
if fsm_state == FSM_STATE_NONE:
if byte == 0x00: fsm_state = FSM_STATE_ZERO
else: fsm_state = FSM_STATE_NONE
elif fsm_state == FSM_STATE_ZERO:
if byte == 0xFF: fsm_state = FSM_STATE_SERVO_CONTROL_0
elif byte == 0xFE: fsm_state = FSM_STATE_CAMERA_CONTROL
elif byte == 0xFD: fsm_state = FSM_STATE_LED_CONTROL_0
else: fsm_state = FSM_STATE_NONE
elif fsm_state == FSM_STATE_SERVO_CONTROL_0:
fsm_state = FSM_STATE_SERVO_CONTROL_1
elif fsm_state == FSM_STATE_SERVO_CONTROL_1:
fsm_state = FSM_STATE_SERVO_CONTROL_2
s0_pan_position(((byte & 0xFF) << 8) | ((last_byte & 0xFF) << 0))
elif fsm_state == FSM_STATE_SERVO_CONTROL_2:
fsm_state = FSM_STATE_SERVO_CONTROL_3
elif fsm_state == FSM_STATE_SERVO_CONTROL_3:
fsm_state = FSM_STATE_NONE
s1_tilt_position(((byte & 0xFF) << 8) | ((last_byte & 0xFF) << 0))
elif fsm_state == FSM_STATE_CAMERA_CONTROL:
fsm_state = FSM_STATE_NONE
elif fsm_state == FSM_STATE_LED_CONTROL_0:
fsm_state = FSM_STATE_LED_CONTROL_1
if byte & 0x80: red_led.on()
else: red_led.off()
elif fsm_state == FSM_STATE_LED_CONTROL_1:
fsm_state = FSM_STATE_LED_CONTROL_2
if byte & 0x80: green_led.on()
else: green_led.off()
elif fsm_state == FSM_STATE_LED_CONTROL_2:
fsm_state = FSM_STATE_NONE
if byte & 0x80: blue_led.on()
else: blue_led.off()
last_byte = byte
clock = time.clock()
while(True):
clock.tick()
img = sensor.snapshot()
tags = img.find_apriltags()
if tags and (max_blocks > 0) and (max_blocks_per_id > 0):
dat_buf = struct.pack("<h", 0xAA55)
id_map = {}
first_b = False
for tag in sorted(tags, key = lambda x: x.area(), reverse = True)[0:max_blocks]:
if not tag.id() in id_map:
id_map[tag.id()] = 1
else:
id_map[tag.id()] += 1
if id_map[tag.id()] <= max_blocks_per_id:
dat_buf += to_object_block_format(tag)
img.draw_rectangle(tag.rect())
img.draw_cross(tag.cx(), tag.cy())
if dac and not first_b:
x_scale = 255 / (img.width()-1)
y_scale = 255 / (img.height()-1)
dac.write(round((tag.y() * y_scale) if analog_out_mode else (tag.x() * x_scale)))
first_b = True
dat_buf += struct.pack("<h", 0x0000)
write(dat_buf)
else:
write(struct.pack("<h", 0x0000))
if dac:
dac.write(0)
for i in range(available()):
parse_byte(read_byte())
num_tags = min(len(tags), max_blocks)
print("%d tags(s) found - FPS %f" % (num_tags, clock.fps()))
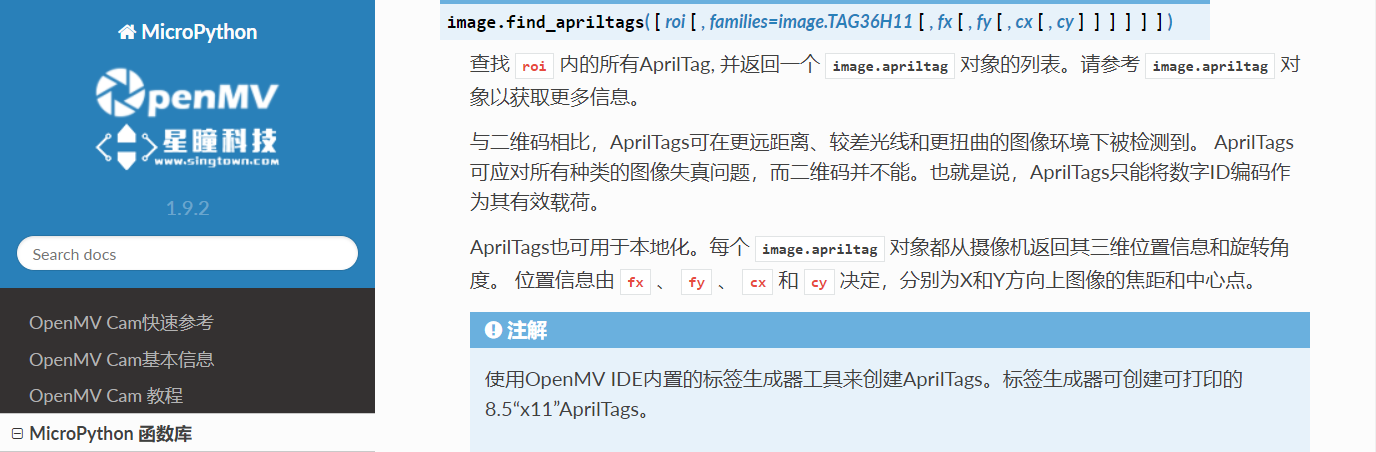
星瞳科技OpenMV官方中文文档函数讲解: