例程讲解-04-color_binary_filter分割图像
本例程为04-image-Filters-color_binary_filter.py
本例程讲述如何利用颜色特征对图像进行分割。
# 颜色二值化滤波例子
#
# 这个脚本展示了二值图像滤波。
# 您可以传递二进制任意的阈值来分割图像。
import sensor, image, time
sensor.reset()
sensor.set_framesize(sensor.QVGA)
sensor.set_pixformat(sensor.RGB565)
#设置颜色阈值,如果是rgb图像,六个数字分别为(minL, maxL, minA, maxA, minB, maxB);
#如果是灰度图,则只需设置(min, max)两个数字即可。
red_threshold = (0,100, 0,127, 0,127) # L A B
green_threshold = (0,100, -128,0, 0,127) # L A B
blue_threshold = (0,100, -128,127, -128,0) # L A B
sensor.skip_frames(time = 2000)
clock = time.clock()
#使用工具 - >机器视觉 - >阈值编辑器选择更好的阈值。
while(True):
# Test red threshold
for i in range(100):
clock.tick()
img = sensor.snapshot()
img.binary([red_threshold])
print(clock.fps())
#image.binary(thresholds, invert=False)此函数将在thresholds内的
#图像部分的全部像素变为1白,将在阈值外的部分全部像素变为0黑。invert将图像
#的0 1(黑 白)进行反转,默认为false不反转。
# Test green threshold
for i in range(100):
clock.tick()
img = sensor.snapshot()
img.binary([green_threshold])
print(clock.fps())
# Test blue threshold
for i in range(100):
clock.tick()
img = sensor.snapshot()
img.binary([blue_threshold])
print(clock.fps())
# Test not red threshold
for i in range(100):
clock.tick()
img = sensor.snapshot()
img.binary([red_threshold], invert = 1)
#invert=1,将黑白反转
print(clock.fps())
# Test not green threshold
for i in range(100):
clock.tick()
img = sensor.snapshot()
img.binary([green_threshold], invert = 1)
print(clock.fps())
# Test not blue threshold
for i in range(100):
clock.tick()
img = sensor.snapshot()
img.binary([blue_threshold], invert = 1)
print(clock.fps())
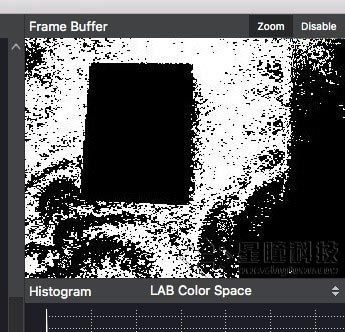
实现绿色图像分割:
原图:

执行程序后:
invert = False

invert = 1